MultiGrid Multi-Agent PPO
Lightweight multi-agent PPO experiments on MultiGrid with shaped rewards, sliding-window checkpoints, and automated trajectory visualizations
Lightweight multi-agent PPO experiments on MultiGrid with shaped rewards, sliding-window checkpoints, and automated trajectory visualizations
UW applied project for local coastal erosion monitoring with DeepLabV3+ image segmentation, ViT-H-14 quality control, and SuperGlue alignment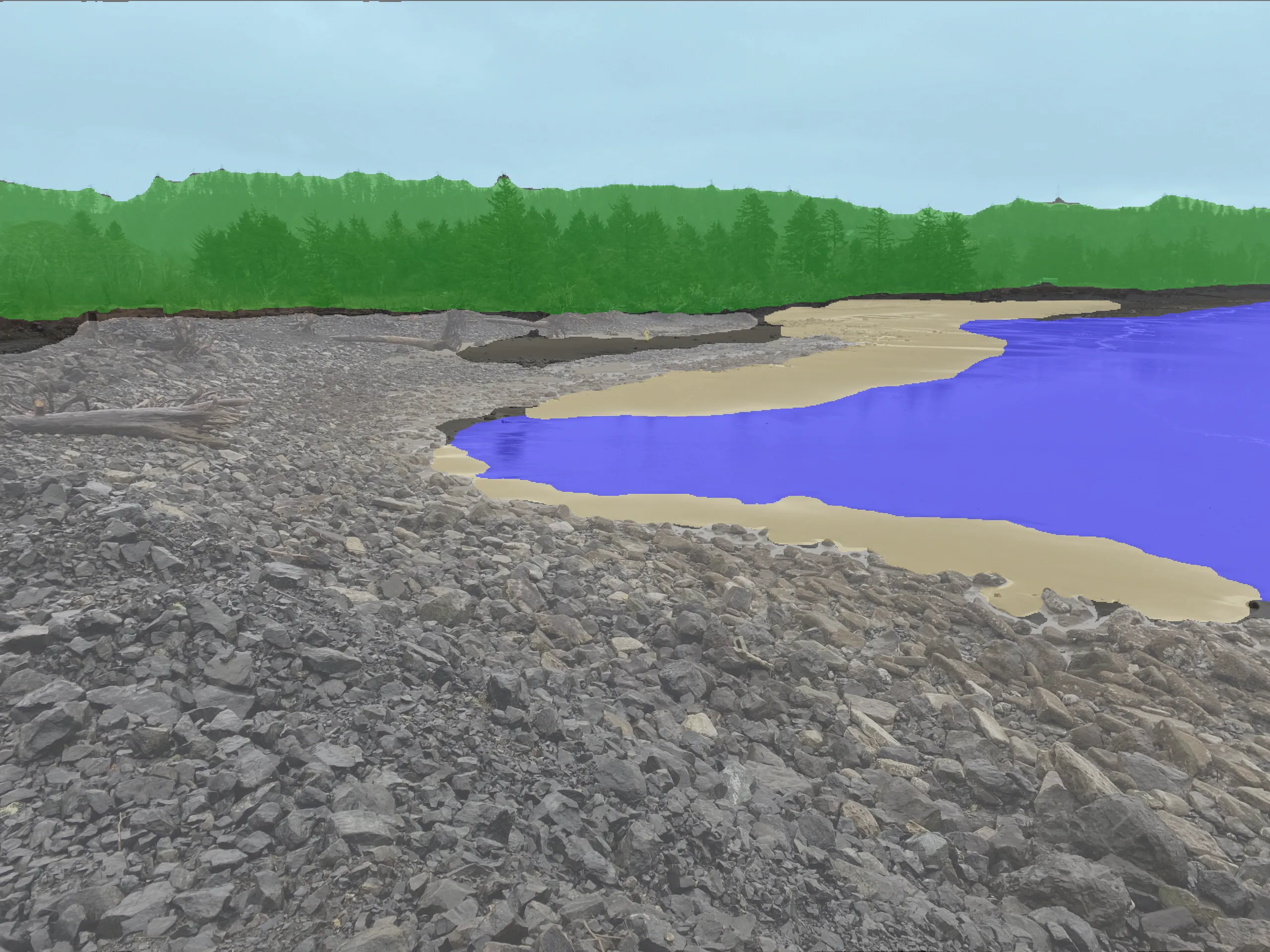
A Unity-based Meta Quest 2 VR app for browsing 3D Gaussian Splatting scenes.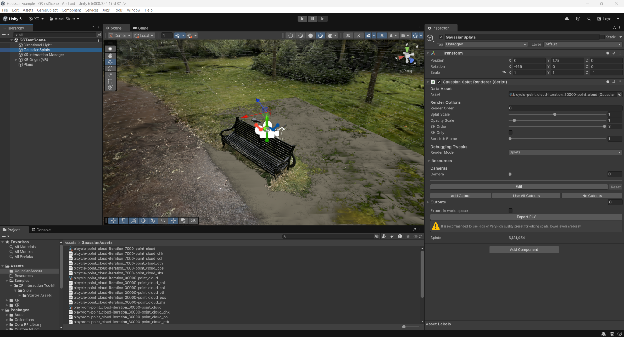
This chatbot uses a multi-agent system to answer questions about machine learning concepts. Link
High speed target detection and playing simulation in Android simulator for automatic music game playing
This demo is used to validate text categorization. Demo Page
Classify if an autonomous driving scene picture is real or fake. Website
This is my project in UW’s EEP596 computer vison course. Slide & Paper
Published in , 2025
While multi-vehicular collaborative driving demonstrates clear advantages over single-vehicle autonomy, traditional infrastructure-based V2X systems remain constrained by substantial deployment costs and the creation of “uncovered danger zones” in rural and suburban areas. We present AirV2X-Perception, a large-scale dataset that leverages Unmanned Aerial Vehicles (UAVs) as a flexible alternative or complement to fixed Road-Side Units (RSUs). Drones offer unique advantages over ground-based perception: complementary birds-eye-views that reduce occlusions, dynamic positioning capabilities that enable hovering, patrolling, and escorting navigation rules, and significantly lower deployment costs compared to fixed infrastructure. Our dataset comprises 6.73 hours of drone-assisted driving scenarios across urban, suburban, and rural environments with varied weather and lighting conditions. The AirV2X-Perception dataset facilitates the development and standardized evaluation of Vehicle-to-Drone (V2D) algorithms, addressing a critical gap in the rapidly expanding field of aerial-assisted autonomous driving systems. The dataset and development kits are open-sourced at this https URL.
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.